研究人员在仿生机器人运动软件领域前进
时间:2025-06-15 12:15 作者:BET356官网在线登录
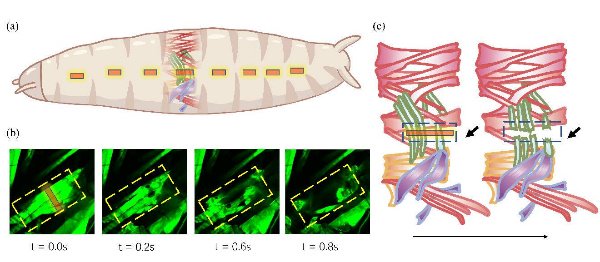
最近,边境技术学院深圳深圳市的深圳校园中东郑和Liang Xudong团队在模仿飞行果实的幼虫的软狩猎机器人运动机制领域取得了新的进步。通过在滚动锻炼过程中,果蝇中肌肉活动的图像观察和机械建模,研究人员发现了这样的原理,即动物可以通过不断雇用和放松内部肌肉来产生滚动矩,将此原理应用于软机器人,以实现自动滚动并打开滚动机制设计的新路径。结果发表在物理审查信中,被称为“编辑的选择”。作为人类文明中的一个里程碑,欢迎轮子的发明,其核心是将theTranslation转换为滚动对。传统上,轴承必须取决于四肢和四肢之间的外部或反应力E环境,例如甲虫转动时的推力动作。但是,自然界中的某些动物表现出完全不同的智慧。通过更改身体的内部结构,您可以独立滚动。例如,如果一团苍蝇以C的形式弯曲其B体,以使他们在发现危险时继续滚动和逃脱,那么这种“驱动的内力”机制尚未得到完全研究。为了解决这个问题,小组首次探讨了内部肌肉如何产生环形对,并在轴承练习期间在果实的果实中执行肌肉活动的高度和空间分辨率时促进电压的运动。研究人员发现,在frut蝇幼虫的滚动过程中,肌肉组沿着身体长轴依次依次地在身体上收缩肌肉和身体运动。当肌肉收缩时,身体以C的形式弯曲。接下来,邻近的肌肉收缩继电器并在屈曲方向上动态改变它,从而导致连续的时间。该机制类似于“波传递”,使身体能够产生环形传导的力矩。幼虫肌肉消融实验。基于此,研究人员具有多尺度的机械模型,可以在统一的框架中结合肌肉动力学,静水骨变形和接触摩擦。我构建了戴尔。该模型表明,幼虫中的氟中心压力保持体壁的刚度和肌肉收缩能的变形有效。随着轴向肌肉的转弯,身体壁上不对称应力的分布形成了滚动力矩。该模型证实,这种连续的膨胀和收缩可以在没有外部力的情况下产生环形动量,从而可以正常预测幼虫在平面,逆甚至空气中的滚动行为。理论和实验观察与量化润滑条件下旋转速度和摩擦的动态平衡非常一致。受到以前的生物学和机械模型的启发,该团队设计和制造了仅由模拟的轴向肌肉组织组成的软机器人,并通过控制这些“肌肉”而成功地通过真实的时间控制来成功证明了自主机器人运动。该实现不仅验证了机器模型的精度,而且还展示了由当前的结构术驱动的新轴承机制的工程可行性。原则上,这项研究系统地发现了内部肌肉序列可以产生滚动力矩的机制,从而破坏了惯性思维,取决于外力。同时,通过对软件机器人的验证,提供了新的想法来设计新的可变形滚动机制,并且可以预期在复杂的Enviro中预计会有有效的操作诸如未来的医疗机器人,现场检测,灾区救援等人的境界等等。相关文档中的信息:https://doi.org/10.1103/physrevlett.134.198401





